


Automata ellenőrzést is tartalmazó robotcellák tervezése és kivitelezése műanyag terméket fröccsöntő gépek kiszolgálására


ENTRA-SYS Kft. – rendszerintegráció:
Automata ellenőrzést is tartalmazó robotcellák tervezése és kivitelezése műanyag terméket fröccsöntő gépek kiszolgálására
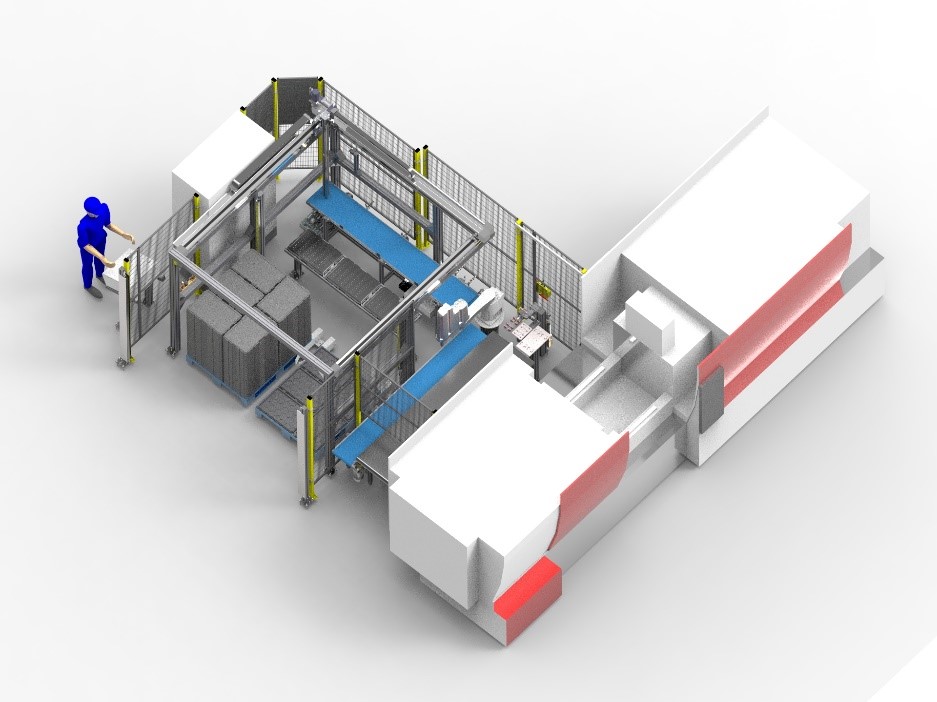
Egy 200 illetve egy 140 tonna záróerejű kizárólag PC/ABS anyagot használó fröccsgép mellé olyan robotcellák tervezése, gyártása, telepítése és beüzemelése volt a feladatunk, amelyek két illetve három termék típust is le tud kezelni a, a fröccsöntő szerszámból történő elvételtől, a selejtek válogatásán át, a bliszterbe pakolásig. A teljes mechanikus tervezést és gyártást, valamint a mechanikus komponenseket illetve a helyszíni telepítést az ENTRA-SYS Kft. biztosította. Az elektromos vezérlés tervezésével, kivitelezésével és a programozási feladatokkal a 3i Kft-t bíztuk meg.
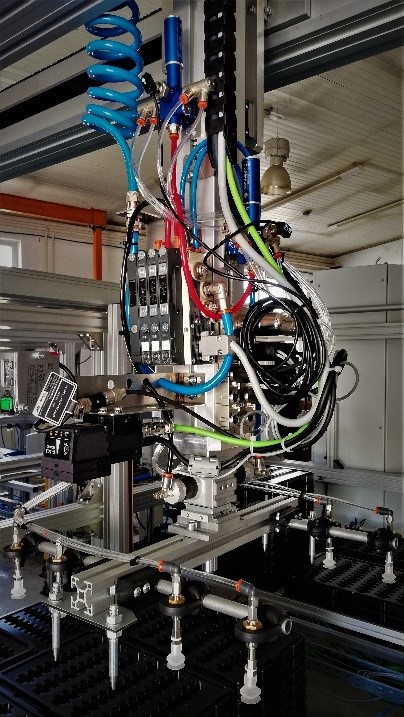
A darabokat és a különálló anguszokat a fröccsgépre telepített síkrobot veszi el a szerszámból. Feladatunk volt a termékspecifikus robotlapok tervezése és gyártása is. Itt az anguszok elvételére darabérzékelős megoldást kellett alkalmazzunk. Az elvétel után az anguszokat egy külön gyűjtőszalagra kell helyezni, mely kihordaja azokat a cellából. A darabokat azonosítás és ellenőrzés miatt egy speciális jig lapra teszi le a síkrobot, ahol fészkenként ellenőrizzük a termékek meglétét. A fröccsgép ellenőrzi a szerszámfészek kitöltöttségét (Cavity eye), az átvett jel alapján a selejtes darabokat azonosítjuk.
Az egyik cellában a jig lapból a jó darabokat egy scara robot egy, a terméknek megfelelő fészkekkel rendelkező bliszterbe (műanyag tálca) pakolja.
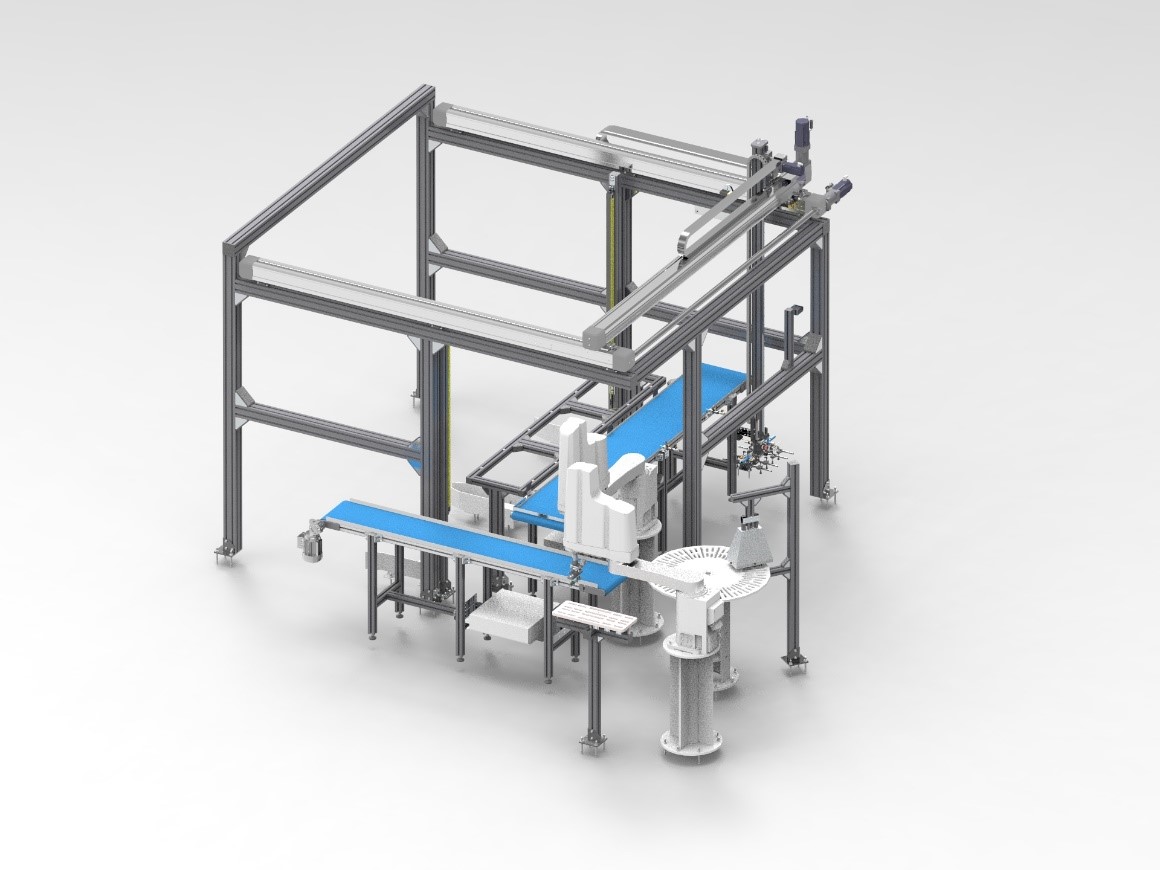
A másik cellában a jig lapból egy szervo körasztalra kerülnek a darabok, itt történik a kamerás ellenőrzés, mely a karcok és egyéb fröccsöntési hibák kiszűrésére szolgál. Ezután a jó darabokat a bliszterbe a selejteket egy selejt kihordó hevederes szállítópályára pakoljuk. Ennél a cellánál két scara robot végzi az egymás utáni átrakási műveleteket. Hibás darbok nem kerülhetnek a bliszterbe. A bliszterkben üres pozíció nem maradhat.
Mindkét cellában általunk tervezett és gyártott 4 tengelyes H prtál végzi a bliszterek mozgatását. Az ürése és a teli bliszterek egy-egy a cellában dedikált helyre pozícionált raklapon helyezkednek el. A raklap minden szintjére 5 bilszter kerül, 2 álló és mellettük 3 fekvő pozícióban. Az elrendezés az üres bliszterek betöltésénél 180°-ban megfodulhat, ezt automatán le tudjuk kezelni. A tálcákat ca 1,2m magasan kell egymásba helyezni a legfölső zárószintet képező tálcák üresek maradnak. A H portál függőleges tengelyének végén egy pneumatikus fotgatómű biztosítja, hogy mindhárom lehetséges pozícióból a vonalkóddal ellátott oldalt a leolvasó elé tudjuk forgatni. Ezzel minden bliszter azonosítása is biztosított. A vákumos fej felett egy lézeres távolságmérő és egy kamera gondoskodik a tálácák azonosításáról és az aktuális rakatmagasság ellenőrzéséről. Az üres bliszter a vonalkód leolvasása után egy puffer szalagra illetve egy előzetes tárolóhelyre kerül, ez biztosít üres blisztert a rakatcsere idejére. A betöltött tálcák is először szintén egy puffer pozícióba kerülnek. Így biztosítható a fröccsgép folyamatos üzeme a teli rakat eltávolítása alatt is.
A H portálok-, szállítópályák és azok váza, valamint az egyéb vázelemek LIPRO aluprofil és gépépítő elemekből készült. A pneumatikus automatizálás Metal Work Pneumatic elemekből (Syntesi levegőelőkészítő, EB80 szelepsziget, ISO6432 munkahengerek, stb.) valósúlt meg. A H portál építőelemei szintén a Metal Work Pneumatikától származnak – SHAK Gantry szervo tengelyek és DAPK 3 pozíciós pneumatikus forgatómű.
A cella kezelése egy nyomógombokból és érintőképernyős kijelzőből (HMI) álló vezérlő felületen keresztül történik. A berendezés működtethető teljesen automat üzemben és ˝kézi˝ üzemben egyaránt. Ilyenkor lehetőség van az egyes mozgások léptetésére, mely beállítás vagy esetleges hiba esetén segíti az operátor munkáját. A cellába való belépés engedélyezése nyomogombbal és a dolgozó RFID kártyájának azonosításáva történik.
Természetesen a cella biztonságtechnikája is a szabványoknak megfelelően, de a legkényelmesebb kezelés, üzemeltetés biztosítása mellett került kialakításra.
Így lehetséges, hogy a fröccsgép és a belső biztonsági zónában történő robot mozgások mellett a külső biztonsági zónában, engedélykérés és a H portál safety pozíció ellenőrzése után lehetséges a rakatcsere.
A közeljövőben tervezett fejlesztési lépés a folyamat autonom raklapszállító robotokkal történő kiszolgálása lesz, melyre mechanikusan már előre felkészítettük a cellákat.
Köszönet a megrendelő sárvári Flex mérnökcsapatának és az alvállalkozó 3i Kft. mérnökeinek, hogy csapatként, közös erőfeszítéssel egy újabb sikeres projektet zárhattunk.


![]()
Videó: https://www.entra-sys.hu/informaciok/video.html
Rendszer-integráció fröccsöntő gépek kiszolgálására (PDF)
Találatok: 1064Megnyílt webáruházunk!

Sikeres pályázataink
![]()
Keresés
Social




Névjegy (vCard)

MÁRKAKÉPVISELETEK
 |
ENERGIA MEGTAKARÍTÁS

PNEUMATIKUS BIZTONSÁGTECHNIKA

OKTATÁS

GÉPÉPÍTŐKNEK


GDPR
![]()
MEGBÍZHATÓSÁG
MÚLT és JÖVŐ
![]()


